Durante años, hemos escuchado que el "hogar inteligente" está llegando, utilizando dispositivos conectados para transformar la vida cotidiana.
Los asistentes personales, los termostatos activados de forma remota, las aplicaciones y los sistemas de iluminación y cocción, limpieza y preparación de alimentos de respuesta rápida prometen mejorar nuestra vida individual al personalizar aspectos de los entornos y la información que nos rodea.
Mientras esta personalización sucede, otra tendencia importante cambia lo que es el hogar y quién está allí. Las personas más jóvenes viven más tiempo con sus padres, o regresan a sus hogares después de estudiar. Personas de todas las edades experimentan con la vida colaborativa y comparten espacios y experiencias. Las familias cambian de forma, y algunas personas en el hogar necesitan cuidados adicionales para adaptarse a la edad, enfermedad o habilidades diferentes.
Estos problemas de diferencia y cuidado desafían la idea de que los sistemas conectados son solo para uso personal. Compartimos nuestro espacio, nuestra información y nuestros dispositivos de maneras complejas, incluso cuando simplemente intentamos superar la "vida cotidiana en el hogar". ¿Cómo podrían los sistemas y productos conectados de Internet de las cosas (IoT) entrar y cambiar los espacios comunes del hogar?
NOTA: Aunque está convocatoria ya fue cerrada, se puede encontrar mayor información en el siguiente link.
La computadora de mi bicicleta de ejercicios dejó de funcionar hace un tiempo, y me sentí menos motivada para andar en bicicleta cuando no podía seguir mi progreso. Decidí construir uno nuevo pero, para ser un poco más divertido, este proyecto tardó 2 días en completarse. Miro Netflix mientras hago bicicleta. La Bicicleta debería darme motivación para andar en bicicleta más rápido. Se conectará a mi computadora y, si no estoy andando en bicicleta lo suficientemente rápido, ALT F4 sale de Netflix.
El producto terminado tiene dos características principales. Tiene cinco velocidades y puedo cambiar la activa presionando el botón azul. Si no coincido con la velocidad mientras ando en bicicleta, cerrará la ventana de mi computadora. Da dos advertencias audibles primero a través del altavoz redondo de la computadora.
La segunda característica es el seguimiento de mi progreso. Mantener presionado el botón azul simulará las pulsaciones del teclado para mostrar cuántas rotaciones hice. Seguiré esos números y los convertiré a millas. Cómo funciona: las rotaciones de la bicicleta se rastrean utilizando un sensor de efecto Hall, que se utiliza para medir la magnitud de un campo magnético. Cuando un imán está frente al sensor, el voltaje en la línea de datos cambia. Se puede colocar un imán en el pedal de la bicicleta para cruzar frente al sensor de efecto Hall en cada rotación. Un microcontrolador (computadora pequeña) puede leer ese voltaje para saber cuándo se ha producido una rotación completa. El microcontrolador tiene funcionalidad Bluetooth de baja energía. Esto es similar al chip que se encuentra en un mouse o teclado Bluetooth. Se anunciará que en realidad es un teclado básico, lo que permite que cualquier computadora se sincronice como lo haría normalmente. Es capaz de simular las pulsaciones de teclas necesarias. Al salir de un programa en la computadora porque el ciclismo es demasiado lento, presionará "ALT + F4", lo que cierra una ventana en la computadora. Al presionar el botón para mostrar mi progreso, la computadora simulará presionar las teclas de letras y números para mostrar cuántas rotaciones hice. Prestep 0: Configuración del IDE de Arduino: el IDE de Arduino es una plataforma de código abierto que hace que la programación de los microcontroladores sea accesible sin tener equipo especializado. Todo lo que se necesita es un cable USB y una computadora. Configurando el IDE de Arduino: la computadora simulará presionar las teclas de letras y números para mostrar cuántas rotaciones hice. Prestep 0: Configuración del IDE de Arduino: el IDE de Arduino es una plataforma de código abierto que hace que la programación de los microcontroladores sea accesible sin tener equipo especializado. Todo lo que se necesita es un cable USB y una computadora. Configurando el IDE de Arduino: la computadora simulará presionar las teclas de letras y números para mostrar cuántas rotaciones hice. Prestep 0: Configuración del IDE de Arduino: el IDE de Arduino es una plataforma de código abierto que hace que la programación de los microcontroladores sea accesible sin tener equipo especializado. Todo lo que se necesita es un cable USB y una computadora. Configurando el IDE de Arduino:https: // www . arduino cc / es / Guide / HomePage Configuración de Adafruit Feather NRF52: https: // learn . adafruit com / bluefruit-nrf52-feather-learning-guide
Jefe del Laboratorio de Tecnologías Libres del Centro de Cultura Digital.
Enrique es un artista e ingeniero mexicano enfocado al desarrollo de proyectos interdisciplinarios con aplicaciones artísticas/culturales/educativas. En su trabajo realiza una exploración sobre las posibilidades creativas de los sistemas digitales, diseño de interfaces físicas y la creación de instalaciones interactivas.
Se graduó en Ingeniería en Producción Musical Digital del Instituto Tecnológico de Estudios Superiores de Monterrey y actualmente trabaja en el Centro de Cultura Digital diseñando soluciones a las necesidades tecnológicas del mismo e impartiendo talleres sobre temas relacionados con la aplicación de tecnología para las industrias creativas.
MakerPower-solar es una combinación de cargador de batería solar inteligente y fuente de alimentación para dispositivos de baja a mediana potencia que los libera de la toma de corriente. Está diseñado para proporcionar alimentación 24/7 a una amplia gama de sistemas integrados y dispositivos IoT.
Características y especificaciones
Operación 12 V
Utiliza los paneles solares de 25-35 W 12 V de bajo costo y los AGM sellados de 7-18 Ah (baterías de UPS).
Las baterías de plomo-ácido son ideales para aplicaciones solares al aire libre porque son más económicas que otras tecnologías de baterías, operan en un rango de temperatura más amplio y son seguras.
35 W de carga máxima de punto de poder
Implementa un algoritmo MPPT para operar el panel solar en el punto de máxima generación de energía para extraer cada bit de energía que el panel es capaz de producir. Más eficientes que los cargadores estilo PWM y mucho más eficientes que solo unir el panel a la batería.
Cargador de tres estados para una carga rápida y segura de la batería (A GRANEL, ABSORCIÓN, FLOTACIÓN).
Compensación de temperatura de carga
El sensor de temperatura controla la temperatura de la batería y ajusta los parámetros de carga para cargar la batería de manera óptima y protegerla de las condiciones de sobrecarga que acortan la vida útil.
Fuente de alimentación de 10 W 5 V
Disponible desde una toma USB Tipo A para plug & play con muchos dispositivos o desde una cabecera de 0.1 "para conexión directa.
Capaz de alimentar un SBC de Linux y una radio de larga distancia como un módem celular o un módulo SatComm.
Cierre de batería baja y reinicio
La salida de cinco voltios se deshabilita cuando la batería está casi descargada y el reinicio automático cuando la batería se recarga.
Señal de alerta disponible para avisar de un inminente apagado para el apagado controlado. Úselo para proteger el sistema de archivos en las aplicaciones de Raspberry Pi.
Interfaz digital
La interfaz I²C proporciona acceso completo a los valores de configuración, estado y configuración del cargador.
Las señales de estado permiten el control directo para sistemas simples.
Modo de solo noche
Activar automáticamente el sistema solo por la noche.
Perro guardián
Asegure la confiabilidad del sistema mediante un ciclo de energía cuando el sistema adjunto se bloquea o se bloquea.
Un caso de uso simple podría ser que quiera hacer una cámara de vigilancia estándar de bajo costo, sin complicaciones (y segura). Las cámaras de vigilancia estándar a menudo se envían con toneladas de software que luego deben ser compatibles con actualizaciones, soluciones de seguridad, etc. Un entorno reducido sin un sistema operativo a escala de escritorio / servidor y servicios en ejecución es por lo tanto más seguro con su superficie de ataque mucho más pequeña. Pero si eso no es suficiente, el bajo costo y el tamaño pequeño deberían convencerlo.
Vídeo remoto en otra aplicación Muchos de nuestros clientes hacen que las cámaras de vídeo-vigilancia sean aplicaciones independientes, es decir, usted las instala y transmite el vídeo a su teléfono cada vez que necesita ver lo que sucede en el extremo remoto. Sin embargo, vemos más y más proyectos donde se transmite vídeo como parte de otra aplicación. Por ejemplo, comederos para mascotas con flujo de vídeo, timbres con capacidades de audio y vídeo, impresoras 3D que puede monitorear, etc.
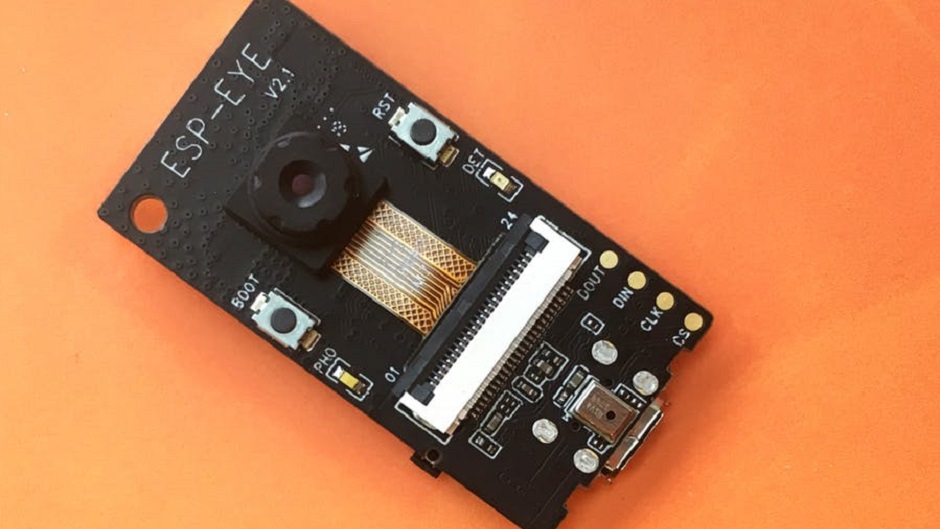
La parte técnica Investigación ESP32-CAM de Ai Tinker Entonces, investigamos el mercado y descubrimos que la ESP32 CAM de Seedstudio era un buen lugar para comenzar y que probablemente fue una de las primeras cámaras basadas en ESP32. Es de bajo costo y tiene todo lo que necesitábamos a bordo, incluida una buena demostración. Más tarde descubrimos que Espressif, el fabricante de ESP32, ha creado un módulo también llamado ESP-EYE .
M5Stack ESP32 Cam Comenzamos con el desarrollo de la M5Stack ESP32 Cam. No tiene la RAM externa adicional, pero en su lugar tenía un USB para el UART ESP32 en la placa, lo que hizo que sea mucho más fácil de programar (no tiene que jugar manualmente con GPIO0, etc. para entrar en el modo de programación flash). )
El problema con M5Stack es que carece de la memoria externa y cuando necesita transmitir una gran cantidad de datos y hacerlo rápido, debe mantener un búfer de paquetes no reconocidos que fluyen desde la cámara a la aplicación, listos para reenviar si los paquetes se pierden en tránsito. Además, necesitas guardar el buffer de marco de la cámara. Por supuesto, esto podría optimizarse para que todo use el mismo búfer, pero esto iría en contra del principio de separación de preocupaciones y también dificultaría mucho la integración.
ESP-EYE de Espressif Como se mencionó anteriormente, descubrimos que el fabricante del chip ESP32 había creado su propio módulo de cámara. Era un poco más caro, pero lo bueno era que venía con USB a UART en el módulo para una fácil programación.
Diseño La siguiente decisión fue cómo hacer el diseño del software técnico.
Transmisión directa. Una forma era crear una transmisión Nabto P2P directamente desde la aplicación que se conecta a la cámara y empujar la transmisión directamente sobre un lienzo de algún tipo. Esto requeriría mucha codificación en el lado de la aplicación, pero probablemente sería súper rápido.
P2P Tunnel MJPEG a través de HTTP En su lugar, optamos por probar si podríamos reutilizar la aplicación desde una demostración anterior utilizando un RPi como una cámara remota. El diseño general es muy similar a las técnicas de túnel SSH. La demostración establecerá un puerto de servidor TCP en el lado de la aplicación que está conectado a un servidor de túnel en el lado de la cámara. Una vez que un cliente (una vista web) se conecta al puerto del servidor en el lado de la aplicación, el servidor del túnel en el lado de la cámara crearía una conexión TCP con el servidor web.
En ambos lados, todos los datos recibidos se reenviarán al otro lado. Esto hace que el cliente parezca que el servidor web en el lado de la cámara se ejecuta en el lado de la aplicación, ya que una solicitud de obtención se reenviará al lado de la cámara y la respuesta de la cámara se reenviará al lado de la aplicación. De esta manera, puede utilizar una aplicación webview estándar para conectarse al servidor web de la cámara (usar el túnel para reenviar los datos de forma remota).
Conocer la visión y el estatus de los programas académicos en el sector educativo con respecto a tecnologías vinculadas al IoT.
Invitado:
Diego Trujillo Pisanty / @cincoinister
Cuenta con una formación multidisciplinaria que incluye estudios en fotografía, una licenciatura en Biología y una maestría en Arte y Diseño de Interacción complementados con programación, electrónica y manufactura. Su trabajo se desarrolla en el ámbito de la experimentación con nuevas tecnologías y se caracteriza por un enfoque subersivo que subraya sus implicaciones.
Verizon, una de las principales operadoras de telefonía móvil de Estados Unidos, acaba de sufrir un duro golpe por parte de Huawei. De acuerdo con varías fuentes, la compañía tecnológica china solicita un pago de 1,000 millones de dólares a la operadora estadounidense por concepto del derecho de uso de más de 230 patentes. La información que ha trascendido señala que las patentes que reclama Huawei se usan en equipos de redes, infraestructuras de cable y tecnología del Internet de las Cosas.
De acuerdo con Reuters, un directivo de Huawei, encargado de las licencias de propiedad intelectual, mandó un mail en febrero a Verizon y les indicó que deberían pagar para “resolver el problema de las licencias de patentes”. Verizon no es cliente de Huawei, y aparentemente usa sin consentimiento patentes de la marca a través de proveedores externos.
Verizon estaría usando las patentes de Huawei en equipos de red entregados por más de 20 sus proveedores, incluyendo algunas de las principales empresas de tecnología de Estados Unidos. Algunas de esas empresas han sido contactadas directamente por Huawei, indicó la fuente que filtró la información. Un primer acuerdo establecería que los proveedores que entregaron tecnología basada en patentes de Huawei indemnizarían a Verizon. Si la información en cierta, Huawei y representantes de Verizon se reunieron en Nueva York la semana pasada para discutir algunas de las patentes en cuestión y establecer un primer contacto para resolver el problema.
El portavoz de Verizon, Rich Young, ya dio una primera declaración:
“No tenemos ningún comentario sobre este tema específico porque puede tratarse potencialmente de un asunto legal. Dado el contexto geopolítico más amplio, cualquier asunto que involucre a Huawei tiene implicaciones para toda nuestra industria y también plantea preocupaciones nacionales e internacionales”, finalizó.
En medio de la guerra entre Huawei y el gobierno de los Estados Unidos, es difícil pensar que esta nuevo conflicto no se encuentre relacionado. El gobierno de Trump sostiene que es posible espiar a los ciudadanos de Estados Unidos a través de las “puertas traseras” en enrutadores y otros equipos de Huawei.
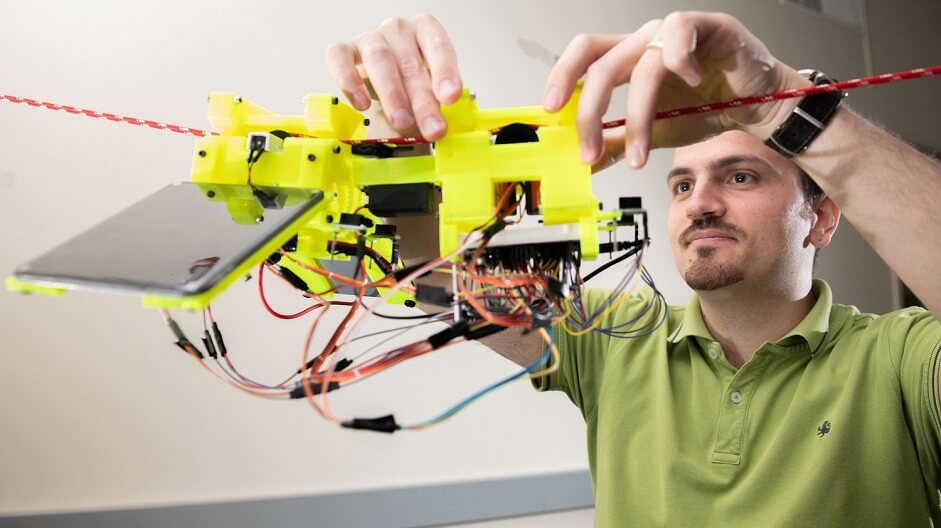
Un nuevo robot alimentado por energía solar diseñado para monitorear cambios a largo plazo en el medio ambiente, como el clima, al detenerse en las copas de los bosques durante meses. El trabajo para el que está diseñado es uno que requiere mucha espera, pero afortunadamente, SlothBot avanza al ritmo de … bueno, un perezoso, y se mueve solo cuando es absolutamente necesario, una estrategia que es excelente para conservar energía.
SlothBot, la creación de un equipo de ingenieros liderado por Magnus Egerstedt en Georgia Tech, se anunció en un artículo publicado en abril en la revista IEEE Robotics and Automation Letters , antes de hacer un debut en pantalla en la Conferencia Internacional sobre Robots y Automatización en Montreal. el 21 de mayo. Funciona moviéndose a lo largo de una serie de cables, e incluso puede cambiar de un cable a otro, una habilidad que los investigadores esperan que eventualmente se traduzca en los árboles. Aunque el robot aún no se ha puesto a trabajar en los bosques para los que está destinado, los investigadores ya tienen planes para probarlo en el Jardín Botánico de Atlanta en un futuro próximo.
Deja que un robot inspirado en serpientes sea tu héroe hoy "En robótica, parece que siempre estamos presionando por robots más rápidos, más ágiles y más extremos", dijo Egerstedt en un comunicado . "Pero hay muchas aplicaciones donde no hay necesidad de ser rápido. Solo tienes que estar allí persistentemente durante largos períodos de tiempo, observando lo que está sucediendo ”.
Para ser claros, el SlothBot actual, que consta de dos componentes motorizados, basados en ruedas, conectados por una bisagra, solo tiene un parecido pasajero con el perezoso real: un mamífero somnoliento que vive en los árboles y pasa sus días descansando en las copas de la jungla. América del Sur y Central.
Puede Interesarle:
https://www.codigoiot.com/iot-indivivual/
Pero lo que la máquina y el animal tienen en común es posiblemente el sello distintivo de la existencia del perezoso: extraordinaria eficiencia energética. Subsistiendo principalmente en hojas y ramitas, un perezoso salvaje pasa hasta 20 horas al día durmiendo, y puede gastar tan poco como 100 calorías en un día determinado, aproximadamente el equivalente a cuatro zanahorias grandes. SlothBot funciona con luz solar en lugar de forraje, pero sus ruedas le otorgan una ventaja energética: a diferencia de los drones, que consumen una gran cantidad de combustible que se desplaza y se desliza de un sitio de aterrizaje a otro, SlothBot puede colgar de un árbol o un cable cuando no está funcionando. , y simplemente deambule por un lugar soleado cuando necesite recargarse.
Esa es una gran ventaja cuando se trata de recopilar datos ambientales, que a menudo abarcan períodos de observación de meses o más. Los drones desplegados por esa cantidad de tiempo no son baratos. Incluso los perezosos reales son viejos en colgar de los cables. "Lo que cuesta más energía que cualquier otra cosa es el movimiento", dijo Egerstedt en el comunicado. "Moverse es mucho más costoso que sentir o pensar. Para los robots ambientales, solo debes moverte cuando sea absolutamente necesario ".
Eventualmente, los investigadores esperan poner a SlothBot a trabajar en el campo en una plantación de cacao en Costa Rica, donde eventualmente podría enfrentarse cara a cara con un perezoso real. En estas granjas, los perezosos salvajes han hecho una especie de patio de recreo con los cables que los trabajadores instalan para transportar el cultivo de cacao . La red flexible también podría proporcionar la plataforma perfecta para que SlothBot explore sus alrededores y, potencialmente, incluso recopile datos sobre los propios perezosos.